Nappy
ECE 3140 Embedded Systems — Final Project
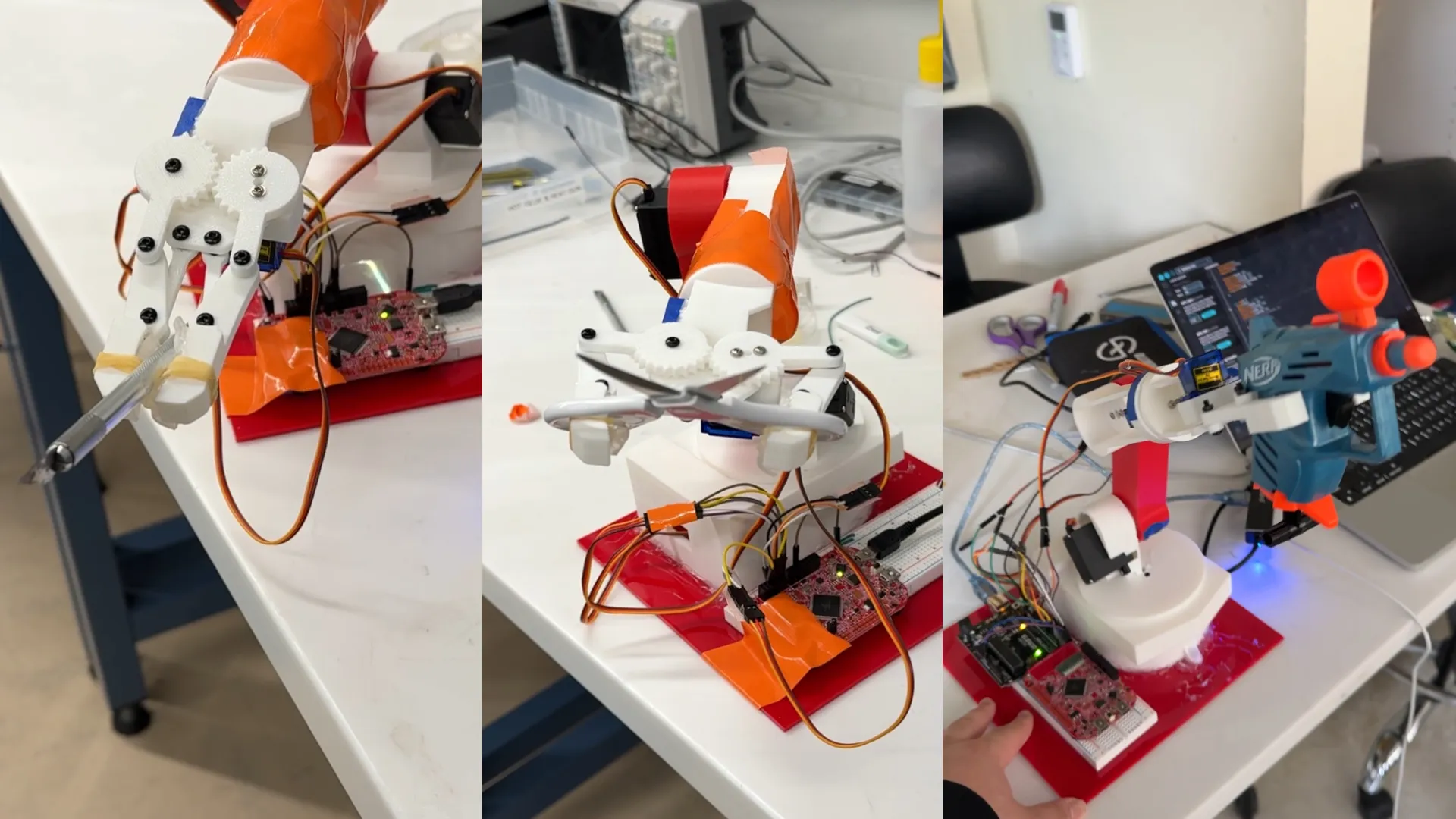
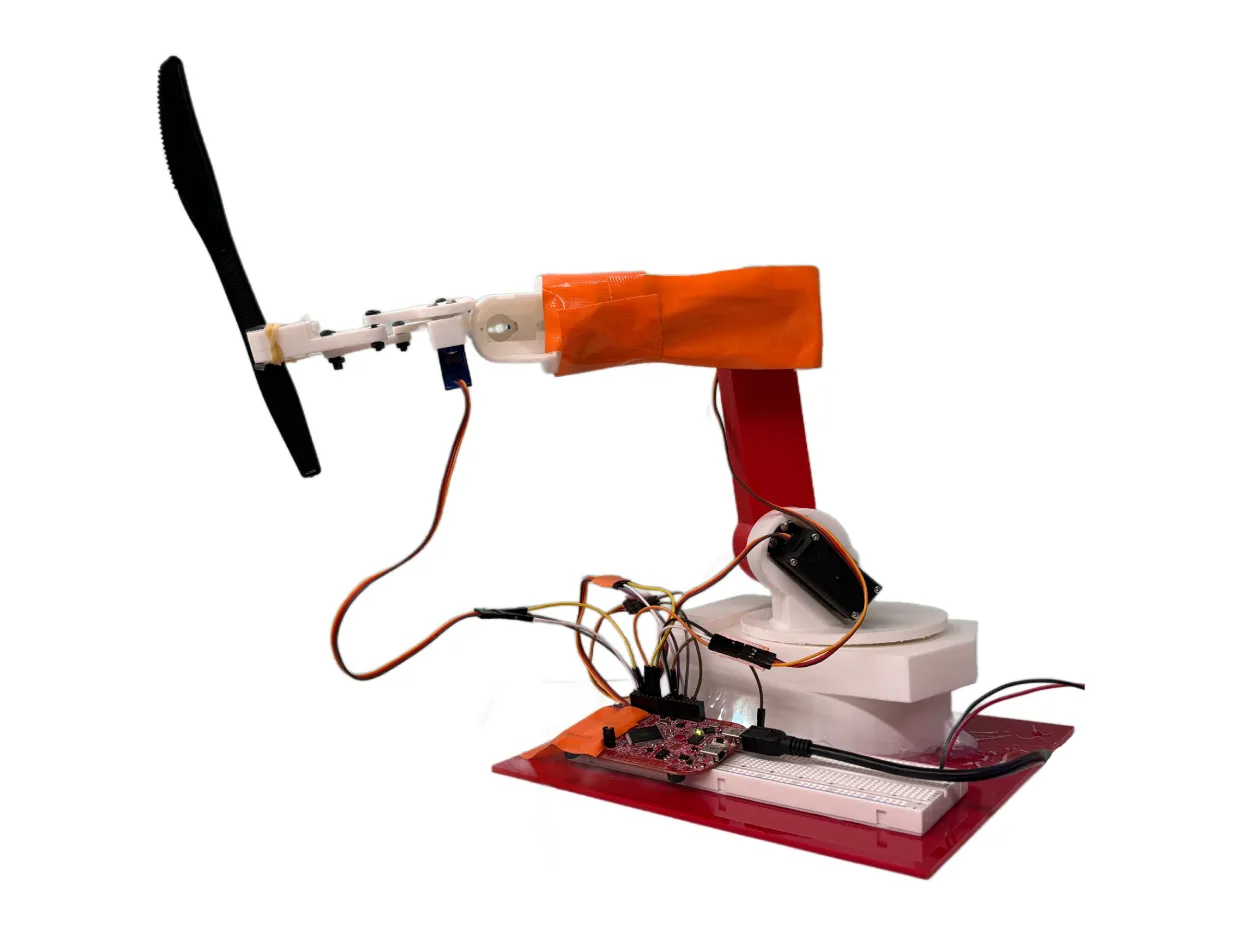
A 4-DOF robot arm with custom control library.
Key Features
- • Custom C library for analog servo control
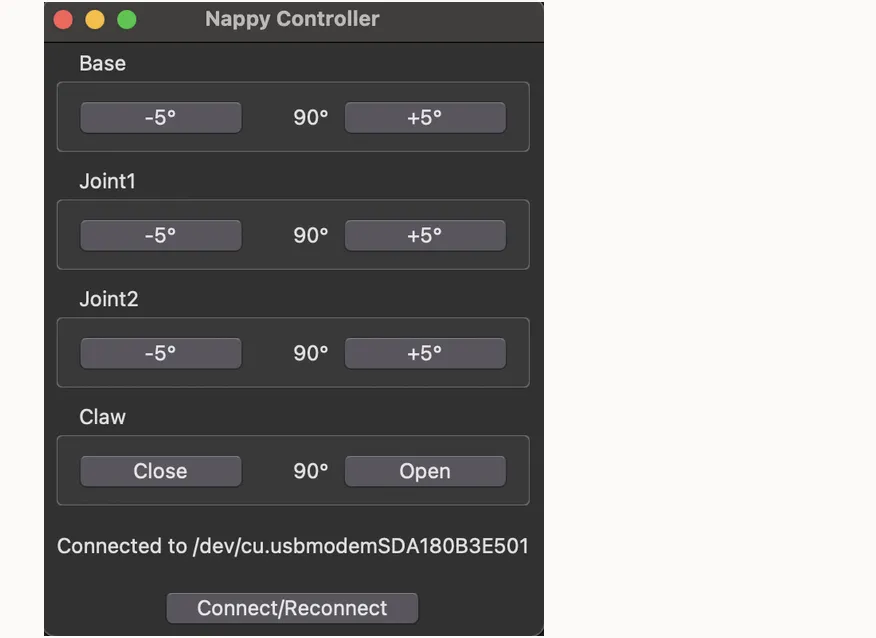
- • Python Tkinter UI for control interface
- • UART communication protocol
- • Modified open-source 4-DOF arm design