Gaussian Splat Localization
Part of SplatOverflow — Published at ACM CHI 2025
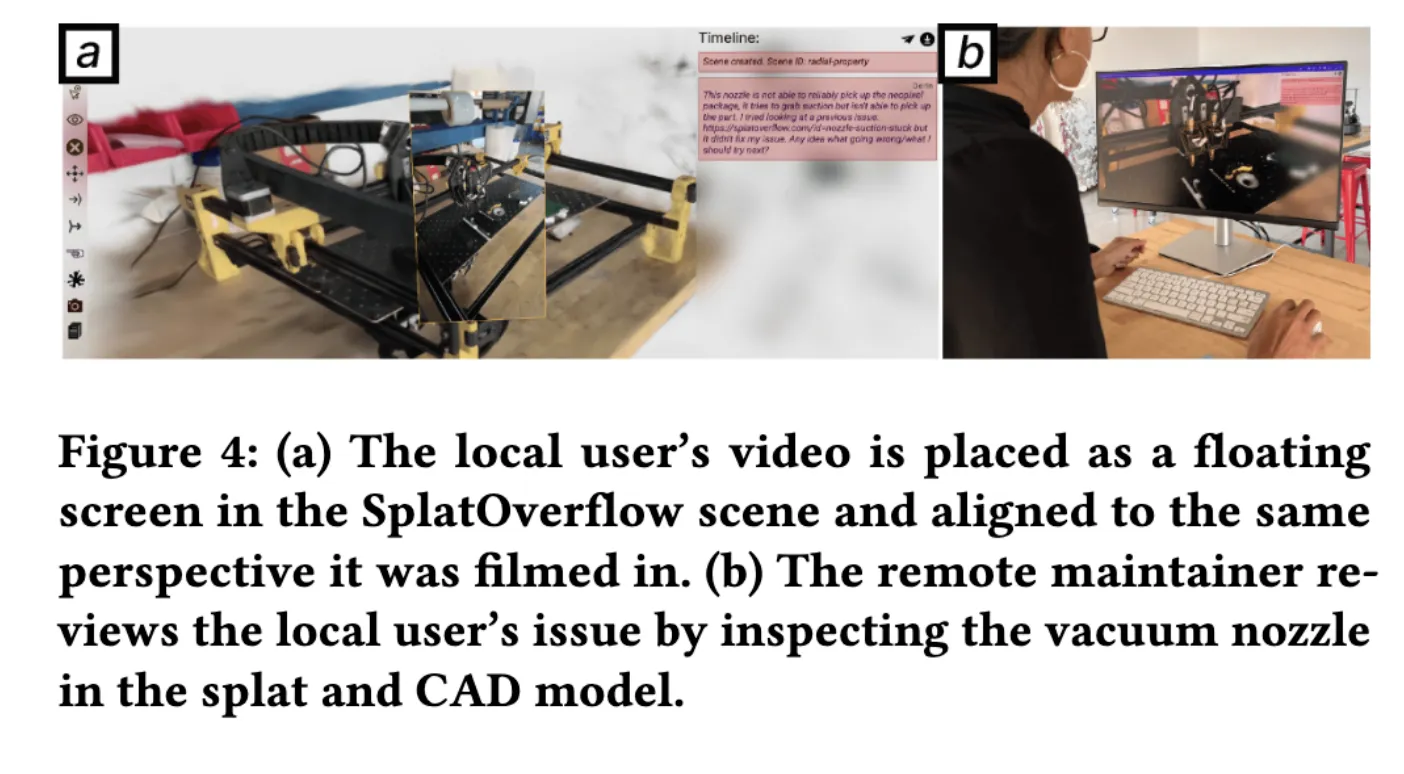
Splatoverflow is a paper about using 3D Gaussian Splats linked to a CAD model as artifacts for remote hardware device (e.g., 3D Printers) debugging for remote maintainers.
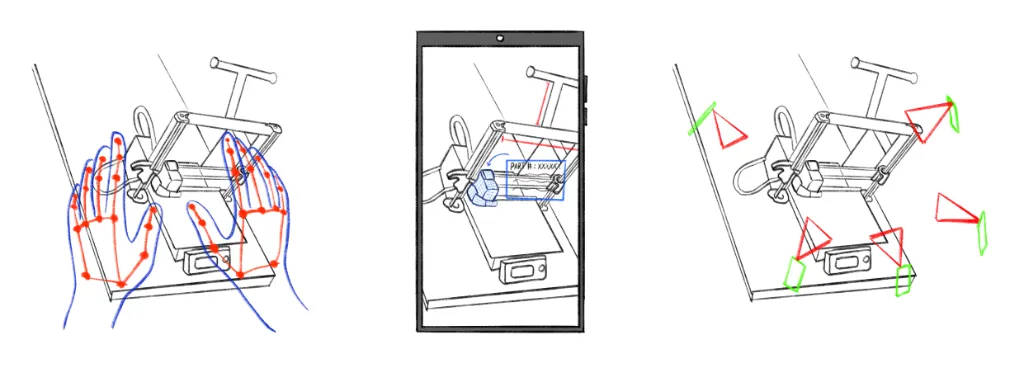
Real-time localization in Gaussian splat scenes and SfM models.
The GIF on the left shows real-time camera tracking within a 3D scene using a standard phone camera.